

安全卡盘的安装方式有底脚安装或法兰安装,轴端可选,橡胶护手板,可以在不拆除机器安全卡盘的情况下更换磨损部件。Vt磨损部件的硬度可根据缠绕轴颈进行调整。尺寸和几何形状可以很容易地改变。独特的插座设计为...
纠偏器如何操作?首先将需要纠偏的卷筒料按要求固定在纠偏器指定位置,并按要求与切袋机或印刷机连接。把纠偏机电源连接线接入三相电插板,打开纠偏机控制器电源总开关、电眼开关、检查纠偏控制器面板、电眼灯是...
气涨轴又分为板条和键式,两种产品的特点也稍有不同,目前这两种气涨轴被广泛应用于锂电隔膜、铜箔、光学薄膜、纺织、印刷、造纸、包装等行业中。只需要对着气涨轴上的气嘴充气便可完成,顶住外部的部件(比如圆形...
滑动安全夹头允许卷轴在机器运转过程进行轴向调整。 调整可以通过手轮或者自动机构进行。 轴向定位装置确保卷轴安全,准确的传递转矩。滑动安全夹头有分为轴座型、法兰型和法兰固定型。常用于纺织行业、包装行业...
纠偏系统(纠偏装置)是对薄型物料在高速传送过程中的位置偏移进行控制、纠正的自动控制系统,具有自动检测、自动跟踪、自动纠偏等功能,能对纸张、薄膜、不干胶带、铝箔、带钢及其它物料的标志线或边缘进行跟踪纠...
OLG 气胀轴适用于分条、印刷、复卷、涂布、贴合及其他需求较高真圆或表面卷取之机械协作运用。是一种特制的收卷、放卷轴,也就是经过高压充气后表面(指键条)可以突起的轴,放气后表面部份(指键条)矫捷缩回的轴叫做...

安全卡盘防止无意轴释放在操作期间专为各种载荷和速度条件手轮锁炮塔络筒机及相关应用程序 可更换插入最小化的所有权成本,以及确保长期的最佳性能独特的插座设计为高速度和高负载应用程序最小化振动标准的或可定...
纠偏器用于涂布机,自粘机,贴合机,分条机,复卷机,包装印刷机械等.及对边机件。由纠偏器B发出红外光/超声波/激光/可见光监测卷材的运行,将信号发送给控制器A。控制器发现卷材有位置漂移后,根据控制者预先设定的指...

气涨轴在购买之后需要对其进行基本状况的检查,对机器有初步的了解,介绍它的基本检查项目: 1.气涨轴设备的可动部件是否均已经可以自由移动。可动部件的停止位置是否恰当。 2.气涨轴设备的机械、液压、气动...

轴座式安全夹头安装时将脚坐固定,气胀轴或方钢两端分别安装进安全夹头的卡槽中,安全夹头卡槽可手动推动打开,转动时自动归位,安全夹头尾端通过电机传动带动夹头转动,从而带动卷料轴的转动。法兰型安全夹头,...

EPC纠偏系统是对边的,就纠边的,CPC是对中纠偏的,这个是纠材料中间的基准线的,CPC用的很少的,只有整体材料宽度不一致的情况下回采用,就是一卷材料有的地方宽,有的地方很窄,会用到,大部分都用EPC纠偏系统...

板条式气胀轴是一种收放卷轴,主要通过控制轴中心的气囊膨胀与收缩,而使整条气胀轴外径变大或复原。板条式气胀轴膨胀起的是整条铝合金板片,支点匀散,受力均匀,可适用收卷精密度较高的机械或收卷较轻的物料,...

OLG 卷取机器用的安全卡盘用于对物料进行卷取或导开,根据需要,还可以与电动机连接做主动旋转,又可以做被动旋转。安全卡盘为连接传动及脱离动作之频繁提供了快速,确实,简易及安全的联轴器;加工精度保证定位的准...

纠偏器可以进行线条、中心线和边缘的跟踪,功能性好,适应性也强;对卷材的密度是没有什么要求的,可以用在不同颜色的卷材中,不过它在透明的卷材中也有着很好的纠偏功能。它的操作方式是比较灵活的,可以选择手动...
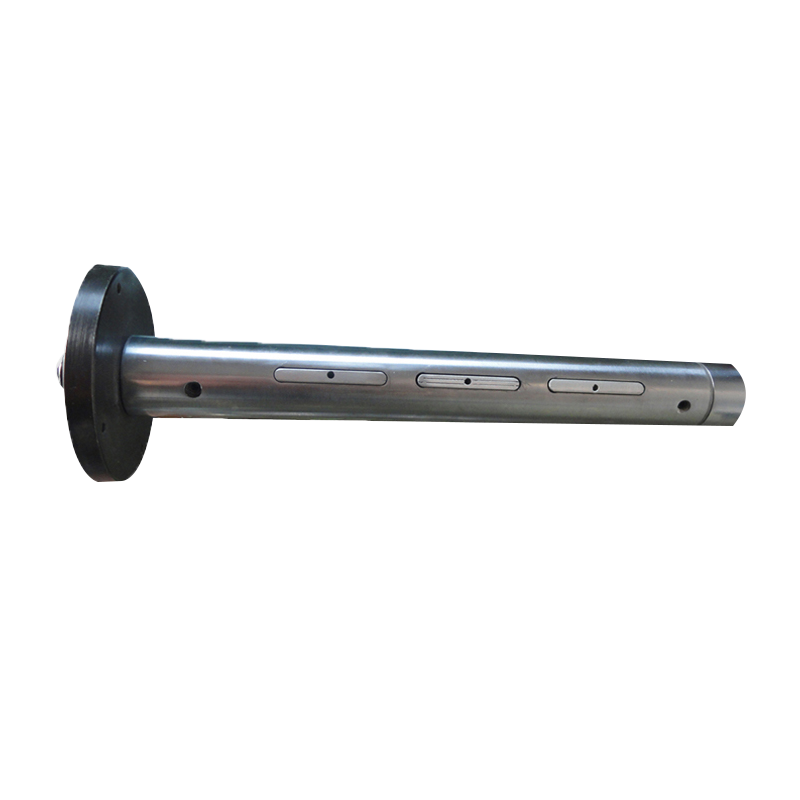
气涨轴轴身为实际工作需要设计,对厚薄宽窄等各类型卷管皆能适用。其作为独立设计的零件,从1英寸---12英寸,长短大小均由客户实际需要确定,凡有分条、印刷、复卷、涂布、贴合、制袋、造纸等工为设备或其它相关中心卷...

OLG 安全夹头在精确定位、在重负载、高速度的应用场合下(切边、定位、张力控制、钢铁机械、放料、纺织机械、电线电缆机械、包装机械、印刷机械、绕线机等自动化生产中)及耐用性上有绝对优势,且安装简单,适合连续...

纠偏系统是对薄型物料在高速传送过程中的位置偏移进行控制、纠正的自动控制系统,具有自动检测、自动跟踪、自动纠偏等功能,能对纸张、薄膜、不干胶带、铝箔、带钢及其它物料的标志线或边缘进行跟踪纠偏,以保证...

OLG 气胀轴的在放气与充气会使用到的一个配件,它主要起到充气及放气的功能,因为气胀轴在工作过程中需要经常需要充气或放气,首先充气手柄要对准气胀轴上的气嘴充气,放气时就也要对着气涨轴气嘴来滑动气芯就可以放...

OLG 我司安全卡盘的制造过程中采用了先进的数控机床和精密加工技术,确保了每个零件的精确制造和完美的配合。这种高精度的制造工艺使得VT1-50-80具有很高的重复定位精度,可以满足各种高精度加工需求。可以承受较大的...

纠偏器一般都是由控制器,传感器和驱动器三单元组成。光学纠偏也不例外。光电探头通过感光检测到材料的位移,转换成电信号传给控制器,控制器内部通过PID计算。再将信号传给驱动器,驱动器根据给出的信号带动纠偏...





 服务热线
服务热线